WORKNC tích hợp mô đun WORKNC Robot để mô phỏng và sửa đổi đường chạy dao, có khả năng điều khiển mọi loại Robot. WORKNC Robot dùng toàn bộ đường chạy dao WORKNC để cho các hoạt động gia công, tôi cứng cạnh, hàn và đánh bóng.
Mô phỏng quỹ đạo trong môi trường tế bào Robot đảm bảo những kết quả không va chạm và xem xét đến các tính năng & ràng buộc Robot đặc trưng
Tính năng
- Mô đun tích hợp
- Quản lý tất cả Cell Element
- Quản lý và phát hiện va chạm
- Quản lý và phát hiện bất thường
- Vị trí Robot bổ sung
|
- Tùy biến bộ xử lí sau cho tất cả ứng dụng
- Tái định vị Robot tại điểm đầu tiên
- Định hướng đầu được xác định trước
- Quản lý trục quay hoặc trục tuyến tính bổ sung
|
Dễ sử dụng
Giao diện người dùng đồ họa của WORKNC Robot cung cấp chức năng lập trình dễ dàng, nhanh chóng, chính xác giúp tạo ra các đường chạy dao phức tạp cho mọi loại vật liệu và máy móc. Quy trình lập trình đơn giản này cho phép nhà sản xuất thấy rõ được các tiềm năng của Robot.
Tất cả chiến lược WORKNC (3 trục, 3+2 trục hay 5 trục đồng thời) có thể được sử dụng để thực hiện tất cả công việc sản xuất khác nhau như: phay, cắt chi tiết, vv với thiết bị có sẵn trong các shop floor.
WORKNC Robot thay thế point to point learning cycle để cắt tỉa chi tiết
Hướng đến nhu cầu đặc trưng
Hiện nay, ngoài các ứng dụng phay, WORKNC còn mang lại những giải pháp cho các lĩnh vực khác. Việc làm cứng cạnh các khuôn rập do WORKNC điều khiển cho phép tiến trình này (thường được làm thủ công) được tự động hóa và đầu laser hướng dẫn được cài đặt trên máy phay NC hoặc robot.
WORKNC Robot tạo ra quỹ đạo trên các dạng hình học phức tạp (các mắt lưới STL hoặc bề mặt Nurbs) có thể được cá nhân hóa cho việc hàn laser hoặc hàn xì.
Mô phỏng
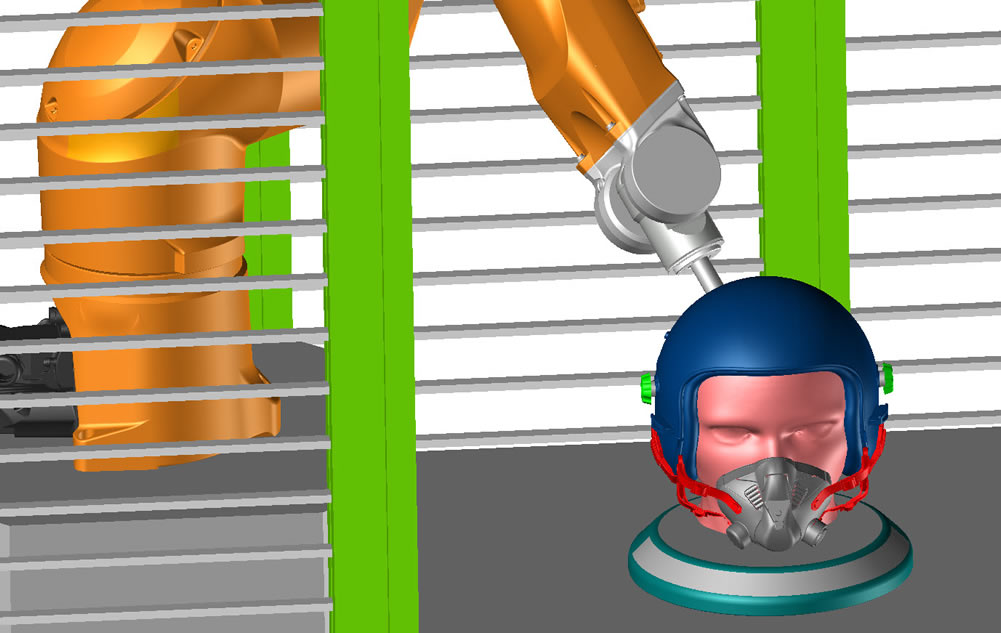
‘Chuyển động Robot phức tạp đòi hỏi robot cell có 1 mô hình CAD chính xác để phát hiện các va chạm cuối cùng giữa các thành phần/yếu tố khác nhau như: robot, the tool changer magazine, table hoặc các hỗ trợ khác, các trục bổ sung và những lớp chắn an toàn.
Tối ưu Quỹ Đạo - Singularity
Quỹ đạo có thể gây ra các vấn đề bất thường trong vòng tay và cánh tay robot. Robot WORKNC có thể tự động phát hiện các rủi ro tiềm tàng trong quỹ đạo và cảnh báo người vận hành để họ có hành động thích hợp.
Khả năng mô phỏng bên trong ứng dụng Robot cho phép tối ưu hóa các chuyển động của robot. Module cung cấp các cấu hình robot hoặc các vị trí bổ sung để đảm bảo tối ưu hóa quỹ đạo.
Độ chính xác quỹ đạo cao đảm bảo thành phẩm đạt chất lượng cao nhất.
Quy trình và Cấu hình cell đa dạng
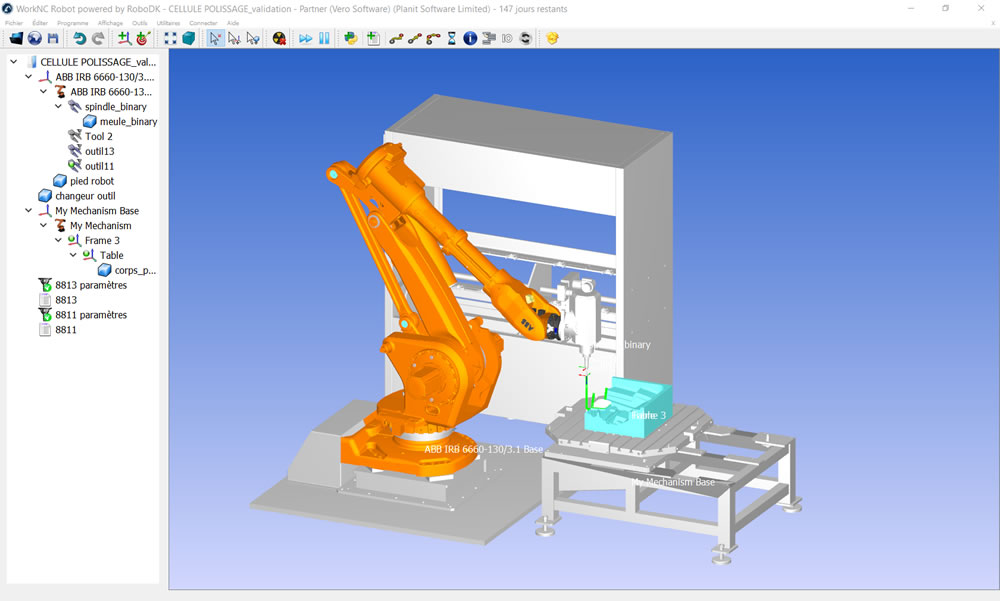
Robot gắn công cụ
Một Cấu hình cell Robot gắn công cụ cho phép gia công hoặc thực hiện nhiều quá trình trên những chi tiết lớn và nặng.
Quá trình này mang lại khả năng thay đổi công cụ hoặc thiết bị gia công trên Robot nhờ việc sử dụng tool changer magazine. Một số dụng cụ có thể được đặt đồng thời trên đầu Robot.
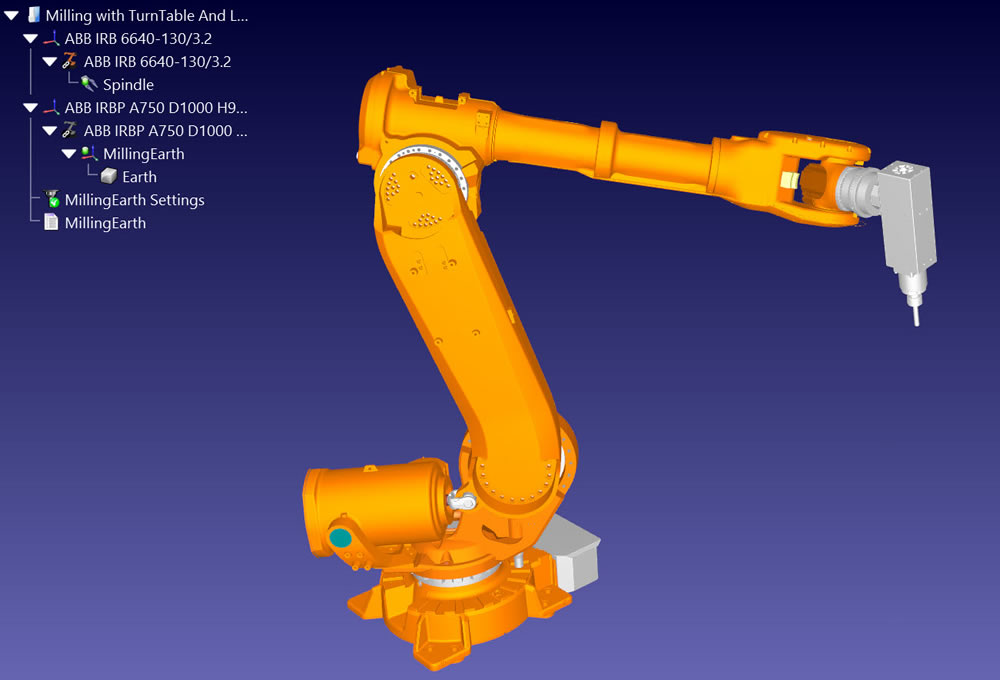
Robot gắn chi tiết
Kiểu giải pháp này được áp dụng cho các mục đích sản xuất hàng loạt trên những chi tiết nhỏ hơn giới hạn bởi khả năng Robot.
Quá trình này cho phép kiểm soát tự động các cell từ việc tải các phôi lên băng chuyền đến việc hoàn tất gia công và đặt chi tiết trở lại băng chuyền.
Động học
WORKNC có thể thử nghiệm bất kỳ loại Robot nào từ 4 đến 7 trục cùng với trục bổ sung như: bàn xoay, rô-bốt gắn trên đường ray, gantries với 3 trục tuyến tính
WORKNC Robot cung cấp thư viện với hơn 250 máy từ 22 nhà cung cấp.
Các loại Robot
WORKNC Robot có thể tương thích với mọi loại Robot
Bộ xử lý sau của WORKNC Robot, có thể được cấu hình theo các điều kiện sản xuất, tạo ra các chương trình thử nghiệm tất cả các loại robot xem xét tất cả các tham số có thể nhờ vào một bộ mô phỏng cụ thể dành riêng cho mỗi bộ điều khiển:
- STAUBLI (VAL3, Version 6 & 7)
- ABB
- FANUC
- YASKAWA_Motoman
- KUKA
- …..











 Gia công WORKNC Robot
Gia công WORKNC Robot